จำนวนการเข้าชม: 14 ผู้แต่ง: บรรณาธิการเว็บไซต์ เวลาเผยแพร่: 2024-05-03 ที่มา: เว็บไซต์
注意:
1.请确保文中的激光器上示与您使用的激光器为同一型号 本文适用 YLR-1000/1500-K 型号
2.如激光器厂家信号更改,则下列接线失效,请按的厂家提供的定义接线
3.请务必确认激光器使能.PWM的电压,如需5V则外接5Vเปิด关电源,本文使用了5Vเริ่ม关电源
4.请务必确认激光器的模拟量电压,控制板默认输出0-10V,如需0-4V请打量盒更改跳帽J7
ความสนใจ:
1. โปรดตรวจสอบให้แน่ใจว่าไอคอนเลเซอร์ในบทความเป็นรุ่นเดียวกับเลเซอร์ที่คุณใช้ บทความนี้ใช้ได้กับรุ่น YLR-1000/1500-K
2. หากสัญญาณของผู้ผลิตเลเซอร์เปลี่ยนแปลง การเดินสายไฟต่อไปนี้จะล้มเหลว โปรดเชื่อมต่อสายไฟตามคำจำกัดความของผู้ผลิต
3. ตรวจสอบให้แน่ใจว่าเปิดใช้งานเลเซอร์แล้ว แรงดันไฟฟ้า PWM หากคุณต้องการแหล่งจ่ายไฟสลับ 5V จากภายนอก 5V กระดาษนี้ใช้แหล่งจ่ายไฟสลับ 5V
4. อย่าลืมยืนยันแรงดันไฟฟ้าแบบอะนาล็อกของเลเซอร์ เอาต์พุตเริ่มต้นของบอร์ดควบคุมคือ 0-10V หากจำเป็นต้องใช้ 0-4V ให้เปิดกล่องควบคุมและเปลี่ยนจัมเปอร์แคป J7
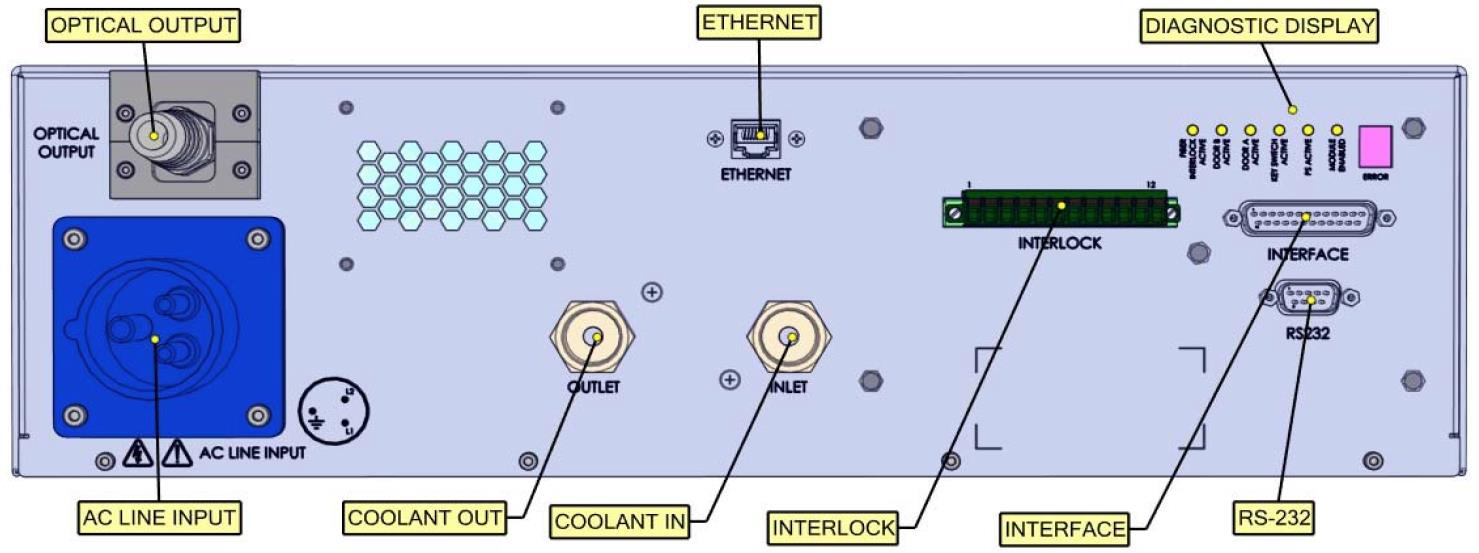
YLR-1000/1500-K ภาพพื้นหลัง
รูปที่ 1 แสดงไฟเบอร์เลเซอร์ YLR-1000/1500-K

接线逻辑
ตรรกะการเดินสายไฟ
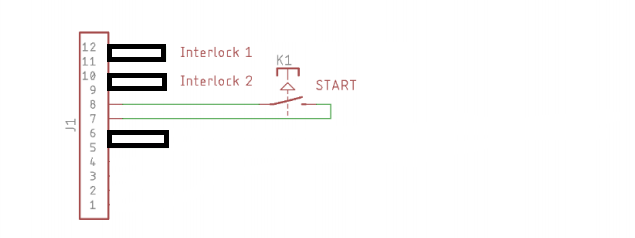
1.首先短接三组信号(线序从左到右1-12)
2.其中【7/8】使用触点按钮START接常เปิด脚
1. การลัดวงจรครั้งแรก [5/6] [9/10] [11/12] สัญญาณสามกลุ่ม (ลำดับเส้นจากซ้ายไปขวา 1-12) ในแผนภาพ ① เทอร์มินัล INTERLCOK
2. โดยที่ [7/8] ใช้ปุ่มสัมผัส START เพื่อเชื่อมต่อพินเปิดปกติ
3.INTERLFACE端子接线,提供模拟量,使能,PWM信号,因机型特殊,需要使用5V电源
3.สายไฟเทอร์มินอล INTERLFACE ให้สัญญาณอนาล็อก เปิดการใช้งาน สัญญาณ PWM เนื่องจากรุ่นพิเศษต้องใช้ไฟ 5V
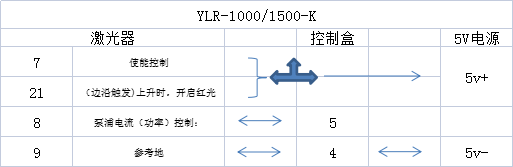
激光器的7/21脚一起接5V电源的+提供使能和红光信号,但由于是上升沿触发,所以中间使用带锁的按钮接常เปิด脚
激光器的8号脚接控制盒的信号接口三的5脚提供模拟量,但由于本机型是0-4V,所以务必在主板跳线(J7处的跳帽)
激光器的9号脚为公用地,接控制盒的4号脚并且连5V电源的-提供所有的参考地
4.เริ่มต้น
激光器上电--按下触点按钮--按下带锁按钮-正常焊接
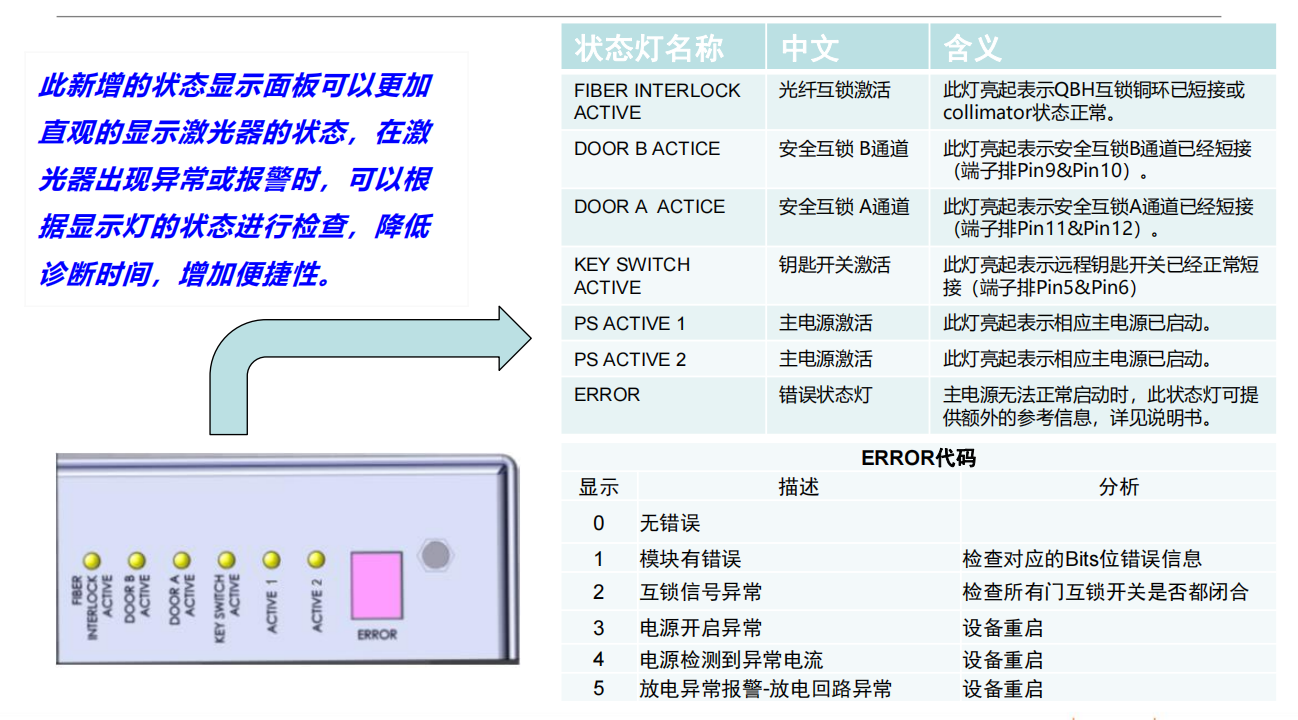
附件状态参考
พิน 7/21 ของเลเซอร์เชื่อมต่อกับ + ของแหล่งจ่ายไฟ 5V เพื่อให้เปิดใช้งานและสัญญาณไฟสีแดง แต่เนื่องจากถูกกระตุ้นโดยขอบที่เพิ่มขึ้นจึงใช้ปุ่มล็อคตรงกลางเพื่อเชื่อมต่อพินเปิดปกติ
ขา 8 ของเลเซอร์ต่อเข้ากับขา 5 ของอินเทอร์เฟซสัญญาณ 3 ของกล่องควบคุมเพื่อให้เป็นอนาล็อก แต่เนื่องจากรุ่นนี้เป็น 0-4V จึงต้องอยู่ในจัมเปอร์ของเมนบอร์ด (ฝากระโดดที่ J7)
เลเซอร์หมายเลข 9 เป็นพื้นที่สาธารณะ เชื่อมต่อกับกล่องควบคุมหมายเลข 4 และเชื่อมต่อกับแหล่งจ่ายไฟ 5V - ให้กราวด์อ้างอิงทั้งหมด
4. ลำดับการบูต
เปิดเครื่องเลเซอร์ - กดปุ่มหน้าสัมผัส - กดปุ่มล็อค - การเชื่อมปกติ
การอ้างอิงสถานะไฟล์แนบ